Products
During the product development Cluster Imaging produced: ⦁ Simulator for Depth Map generation and Depth Map editing tool ⦁ Prototype1, which includes Generic 3D Mini and DSLR versions. ⦁ Prototype2 for transportation different camera configurations to be used for automotive, delivery vehicles, construction, and agricultural machines.
- Simulator for Depth Map generation and Depth Map editing tool
- Prototype1, which includes Generic 3D Mini and DSLR versions.
- Prototype2 for transportation different camera configurations to be used for automotive, delivery vehicles, construction, and agricultural machines.
Simulator and Depth Map editing tool
Simulator used DSLR camera and precise moving device to generate static cluster pattern and then captured images had been passed to PC for Depth Map generation and object editing.
Depth Map Simulation
Quality comparison
- Cluster 3D Provides Higher Image Quality and
- More Accurate 3D Information than any Other Solutions

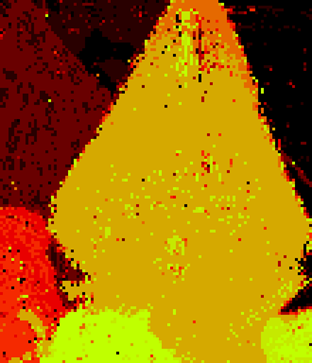
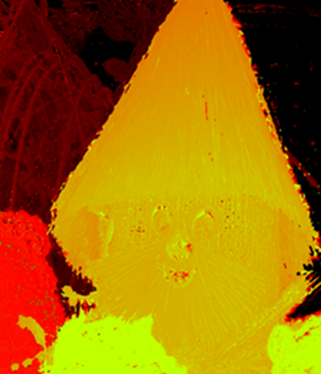
Cropped to 5 bits. ClusterImage Depth at 14 bits
- Minimal Edge Artifacts
- Excellent editing support
- No Loss of Resolution
- Excellent color representation

Depths Map Editing tool
Original image with distances be the objects

3D Special Effects

Refocus with Straw Man in Focus

Refocus with Depth Interval in Focus from Cat to Camel

Refocus with Dual Focus areas: Cat and Dog
Object-level editing using Depth Maps
New images and objects could be added to 3D scene using selected depths.







Prototype1
Generic 3D Mini version of the Prototype 1.
The system employed 11 cameras.
High-resolution 20-megapixel color camera in the center of the ring four 5-megapixel and six 2-megapixel monochrome cameras
Generates up to 20-megapixel Depth Map
Fully custom design
Off-the-shelf cameras and Lattice channel aggregators to provide an interface to a laptop computer running the depth algorithms.

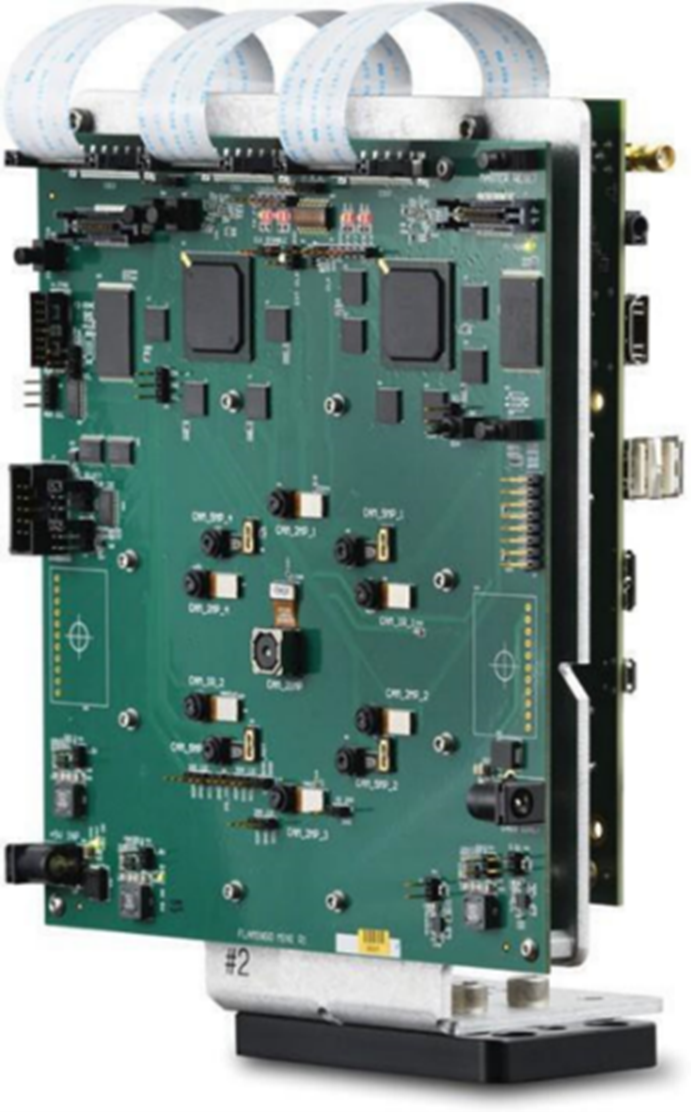
Figure2 Potential implementation of Generic 3D Mini Prototype
Four 5-megapixel cameras of the Generic 3D Mini Prototype were used to generate Traffic Video in the main section of the website.
DSLR version of the Prototype1
Cluster Imaging’s 3D DSLR was designed as an aftermarket accessory that adds depth mapping to interchangeable-lens cameras.
The Imaging’s 3D DSLR was designed as an aftermarket accessory that adds depth mapping to interchangeable-lens cameras.


Prototype2: Automotive Prototype
Major Characteristics
- Major Targets: Automotive, Robocars, Construction Machines
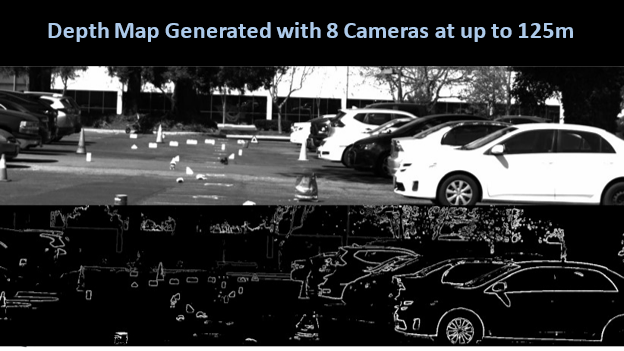
- Configurations are 8, 6, 5 and 4 Cameras
- Standard automotive grade cameras and Nvidia automotive processor.
- Currently using 2-megapixel global shutter cameras
- All Depth Map computations are made on CPU
- The system provides an interface to Computational Neural Network engines,
typically running on GPU
- Accurate Depth Maps in the Range from 2 to 250m


Video created for Cluster Imaging in 2017 to demonstrate the power of 3D editing and content generation in commercial applications.